一直以来,灵巧手都是机器人领域研究的重要课题。
近日,在于深圳举办的机器人技术与产业发展峰会以及“国际人工智能与机器人大会(AIRS)2025”上,忆生科技创始人、计算机视觉与机器学习领域国际顶尖学者马毅分别围绕“机器人灵巧手”与“追求智能本质”为主题发表了主题报告,深入探讨了机器人的关键技术领域——灵巧手背后的核心技术与发展路径,为与会者带来了前沿的技术与行业洞察。

在“机器人灵巧手”主题报告中,马毅强调,尽管广义的“机器人”在工业革命中已占据重要地位,但当前的工业机器人及家用机器人,仍只能在预设环境下执行单一任务,与真正意义上能够适应复杂多变环境的机器人仍存在较大差距。例如,人们日常生活中使用杯子喝水这一看似简单的动作,由于物体大小、环境距离等因素的不确定性,传统机器人难以高效完成。人手具备高度的灵巧性和多感知能力,这正是机器人发展所急需突破的方向。
实事求是地认识技术:不要在人的大脑中帮机器“泛化”能力
让机器人的控制器具备处理不同物体的能力,是迈向通用智能的关键一步,但目前,这一步尚未扎实迈出。在实现机器人灵巧操作的探索过程中存在诸多挑战。大众、投资界乃至产业界在看待机器人能力时,常陷入认知误区,容易因机器人完成某一特定任务,就推断其能处理其它类似任务。以机器人开瓶盖为例,事实上,即便它能打开某一种瓶子的瓶盖,也不意味着能应对其他不同尺寸、重量和材质的瓶子和瓶盖。大众普遍存在对机器人能力过渡乐观的认知,这种过度乐观本质上源于对其训练机理的不了解。 他提醒与会听众,“不要在自己大脑中主动帮机器‘泛化’它们的真实能力”。
一直以来,为了实现机器人灵巧手的复杂操作并融合多模态感知,马毅团队开展了长期且大量的研究工作。从基础任务入手,一个典型的例子是尝试让机器人单只手旋转物体。这一任务看似简单,却充满挑战。不同物体的重量、材质、形状以及重心位置各异,给机器人的操作带来极大困难。以转笔任务为例,来自全球顶级高校与研究机构的联合团队花费近两年时间才取得了一定成果。
关于数据、训练框架与研究方法:虚拟世界与真实世界结合、多种感知方式结合
数据获取和训练框架对于灵巧手研究至关重要,团队采用了虚拟世界和真实世界相结合的方式获取数据。虚拟世界仿真能够快速生成大量训练数据,通过在仿真环境中运用强化学习、反馈控制等方法,可以训练出初步的控制策略。而仿真环境与真实世界毕竟存在差异,真实世界中的机器人往往只能获取有限信息,如自身关节位置等,缺乏物体形状、材质等关键信息。因此,需要借助机器学习方法,实现从仿真到现实的迁移。但这一过程并非一帆风顺,团队通过不断迭代仿真与真实操作,逐步优化控制策略,才使得机器人在面对不同形状和材质的物体时,操作成功率得到显著提升。
除了操作能力,机器人的感知能力同样关键,尤其是触觉感知。人手的触觉极其敏锐,能够在物体即将滑落时及时调整握持姿态。但目前机器人手的触觉感知发展仍较为滞后,成本高昂且精度有限。为弥补这一不足,团队尝试将触觉与视觉、状态反馈等多种感知方式相结合,取得了显著效果。当机器人同时具备多种感知能力时,能够更精准地控制物体,实现按指定角度旋转不同形状物体的操作。
此外,马毅还提到,当前机器人所能完成的任务多为人预先设定和描述的。但人类日常生活中的许多动作,比如炒菜、削苹果等,看似简单,实则难以用精确的算法描述,也无法通过传统的强化学习方法让机器人学习。为解决这一问题,团队借助头盔设备和多摄像头记录人体运动数据,尝试通过头部运动信息和有限的视觉信息恢复整个人体尤其是手部的运动,为机器人的训练提供更丰富、更贴近真实生活的数据源。

报告最后马毅表示,机器人灵巧手是对于具身智能的科学研究与产业发展意义重大,但其发展需要科学看待。目前虽然取得了一定进展,但在相当多的问题上都仍有很长的路要走,未来还有很大的提升空间。这不仅需要科研人员在技术层面持续创新,也需要行业各方共同努力。
探寻智能本质,迈向自主智能
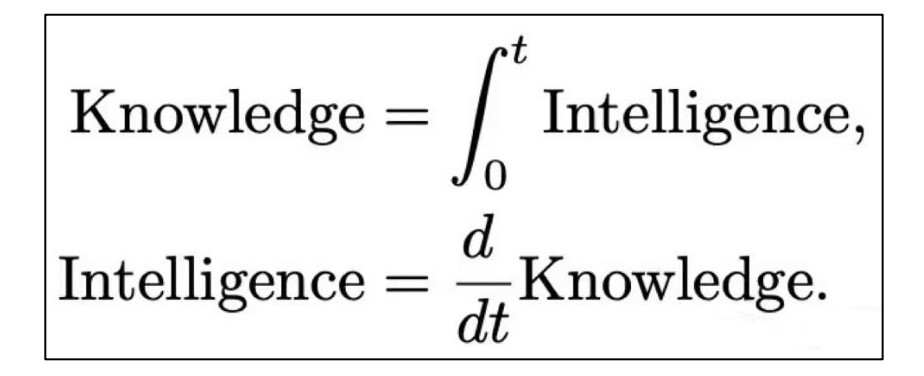
在“追究智能本质”主题报告中,马毅总结并回顾了智能的起源与演进,并强调人类对智能的研究起点并非源于1956年达特茅斯会议而是20世纪40年代,诺伯特・维纳等的控制论为其奠定了理论基础。他着重强调了智能的下一个发展阶段应该是迈向自主智能(AI2.0)。他指出,闭环学习方式使AI能够从经验中持续积累知识,成为可以自主学习、自我完善的智能。他指出,通过闭环反馈可以持续地实现自我学习的一致性,且通过最小化学习的闭环系统不会发生灾难性遗忘。而认知科学和脑科学的研究成果一再有力表明,类似的特征和机制在自然界中无处不在。
他还提出了新时代下关于“什么是智能”的公式化定义,即“一个智能系统是拥有自我纠正和自我改进现有知识(或信息)机制的系统”。任何没有这种机制的系统,无论多么庞大,都不具备智能。
国际人工智能与机器人大会(AIRS)由香港中文大学(深圳)、深圳市人工智能与机器人研究院主办,广东省具身智能机器人创新中心协办。今年的大会主题为“下一代人工智能与机器人”。大会由中国工程院院士、香港中文大学(深圳)校长徐扬生,深圳市科技创新局党组书记、局长张林致开幕辞;中国科学院外籍院士、加拿大皇家科学院院士孙钰,中国工程院外籍院士、德国工程院院士张建伟等亦从各自领域出发相继发表了主题报告。
机器人技术与产业发展峰会由前沿科技研究院与港大科企业主办,香港大学同心基金数据科学研究院、香港大学计算与数据科学学院、深圳市智能机器人研究院等联合主办。清华大学医学院长聘教授、微创脑机接口与微纳机器人领域知名专家张明君,知名企业家、投资人傅盛,IDG合伙人连盟等多位来自学界、企业界、投资界代表出席大会并进行案例与心得分享;机器人业界代表、机器人科研机构代表、多家知名院校企业家校友参会。
忆生科技创始人与团队不仅在智能理论、计算框架、白盒模型等领域有着系统性的突出研究成果,更在此基础上,在数据与算法、工程与应用等层面持续发力,聚焦四大任务(1语义和几何感知,2基于记忆的视觉内容理解,3基于多模态的推理,4具有适应性/泛化性动作执行能力的机器人手),系统化攻坚“手、眼、脑”闭环协作,致力于为快速发展的具身智能产业提供大脑与小脑。
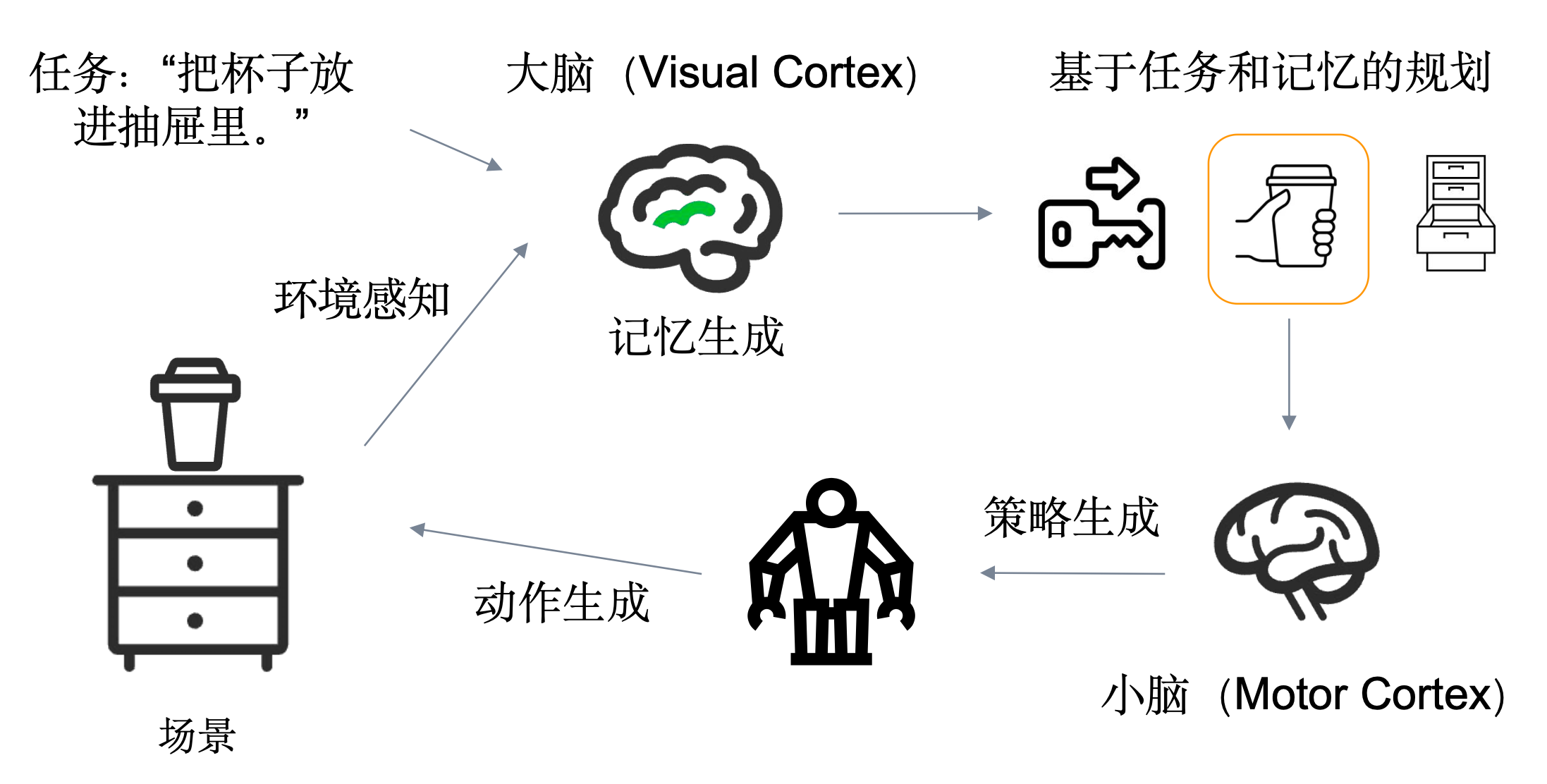
忆生科技产品技术框架
未来,忆生科技将继续秉承科学与创新精神,以推动自主智能(AI2.0)时代更快到来。